Motion control・Bilateral control・Hydraulic actuator・Functional electrical stimulation・Object manipulation・Machine learning
 日本語/English
日本語/English 日本語/English
日本語/English
You can see videos on our research here.
□The difficulty of manufacturing multiple degrees of freedom robots.(Hardware)
〇The difficultness of the flexible control which considers the touch with humans(Software)
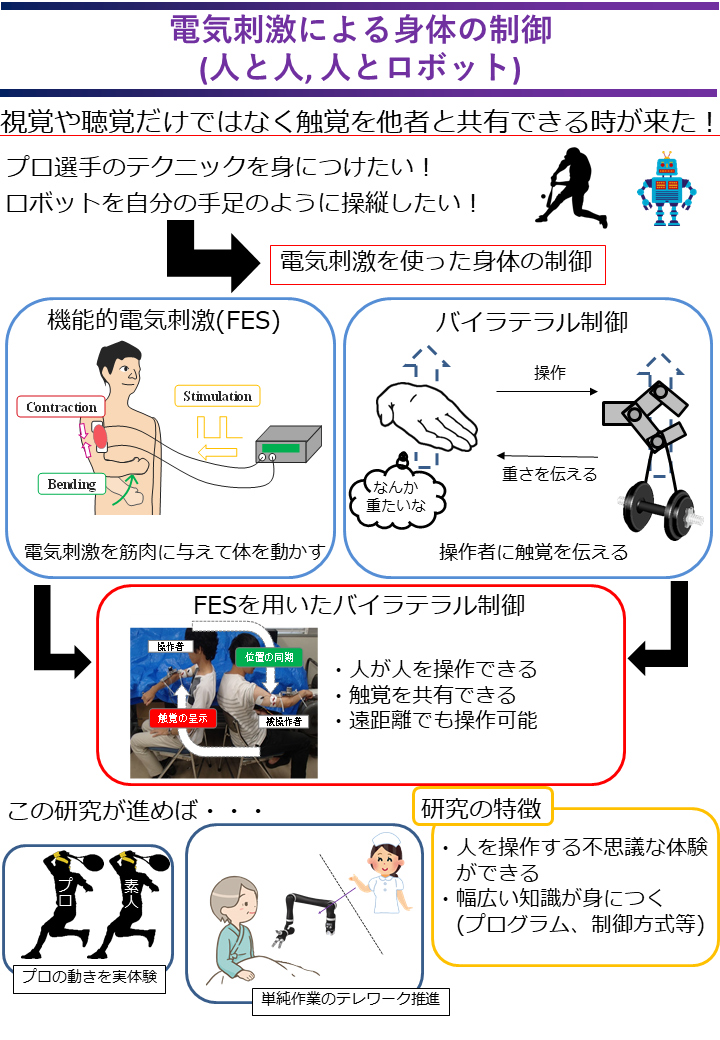
□Hardware ⇒ Control of the human body by functional electrical stimulation
〇Software ⇒ Bilateral control, Force control, Deep learning
-----------------------------------------------------------------------------------------------
・Tactile communication by using robots comes true.(The third communication media following audio and vision.)
・It enables motions that cannot be realized without robots.